Herausforderung: Aus einer flexiblen Schaltung einen quaderförmigen Rover falten
Dieser kleine Roboter, der von einem PCB-Motor angetrieben wird, wurde mithilfe einer faltbaren flexiblen Schaltung erstellt. Die sechsseitige Schaltung ist mit der verschraubten Welle des Rades befestigt und enthält alle notwendigen Sensoren und Treiber zum Betrieb der vier Motoren und zur Steuerung des Roboters.
Die Ergebnisse waren recht zufriedenstellend, aber es bedarf weiterer Entwicklung, damit dieser Bot effektiv in der Außenwelt navigieren kann.
Video ansehen
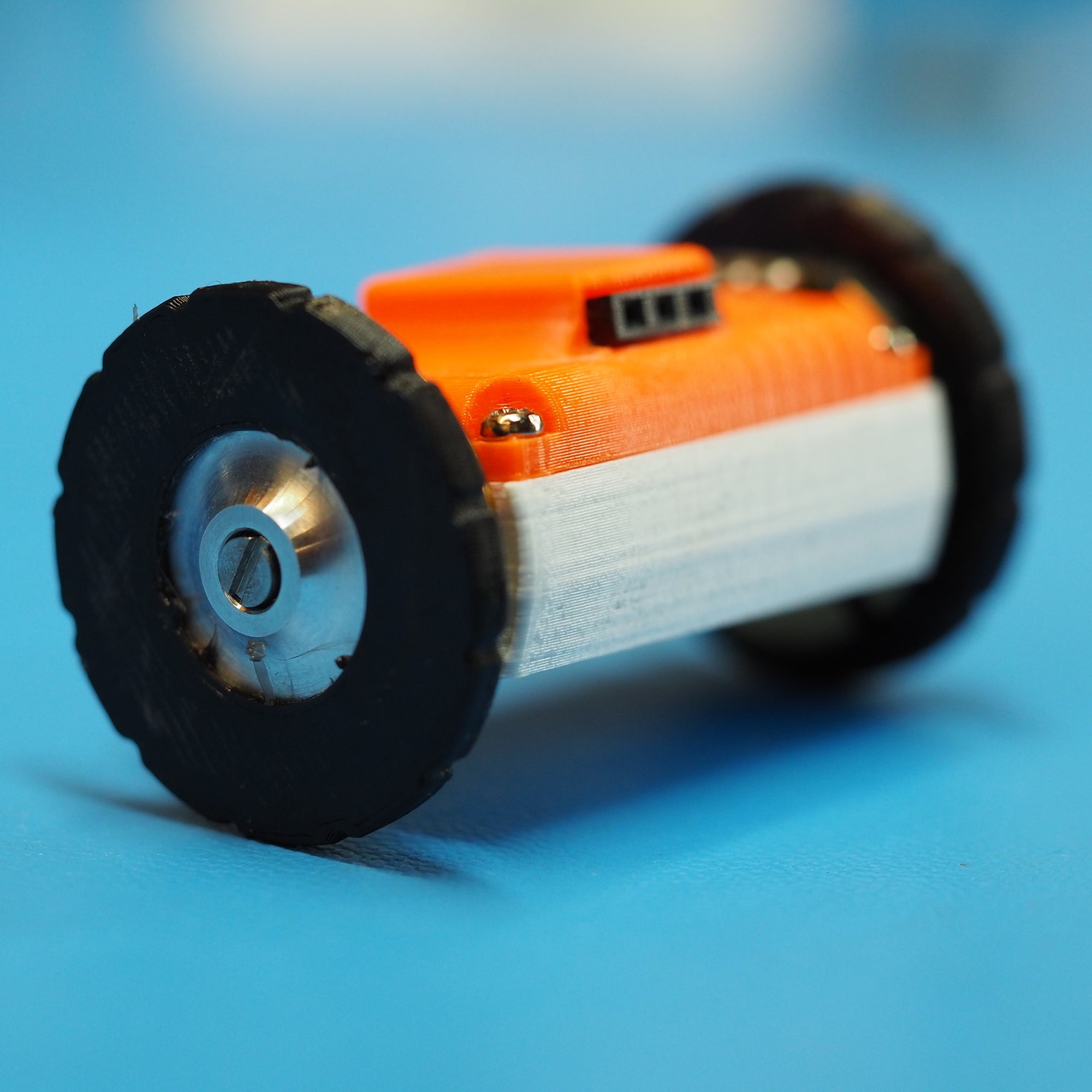
Herausforderung: Bauen Sie einen zweirädrigen PCB-Motorroboter
Bei der Entwicklung dieses Roboters wurden alle Schwächen und Mängel unseres PCB-Motorprojekts deutlich. Mit der Zeit wurden jedoch alle mechanischen Probleme behoben und dieser kleine Bot konnte recht gut fahren.
Die Tatsache, dass dieser Roboter einen flachen PCB-Motor zum Antrieb verwendet, bedeutet, dass er mehr Platz im Inneren hat. Dies wiederum ermöglicht die Verwendung einer größeren 500-mA-Batterie, was seine Batterielebensdauer verlängert.
Video ansehenHerausforderung: Erschaffe mit einem flexiblen Schaltkreis einen springenden RoboFrog
Dieser Roboter wurde aus einem flexiblen Schaltkreis hergestellt. Er ähnelt einem Doppeldecker; auf der Unterseite befinden sich vier Spulen und auf der Oberseite Magnete und Steuerelektronik.
Das Ganze konnte zwar um einige Millimeter springen, Links-Rechts-Manöver blieben jedoch unkontrollierbar.
Video ansehen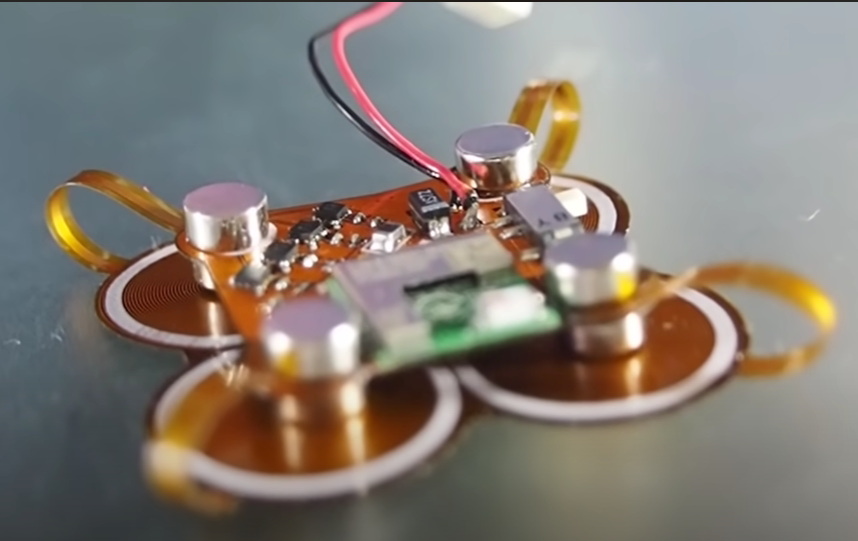

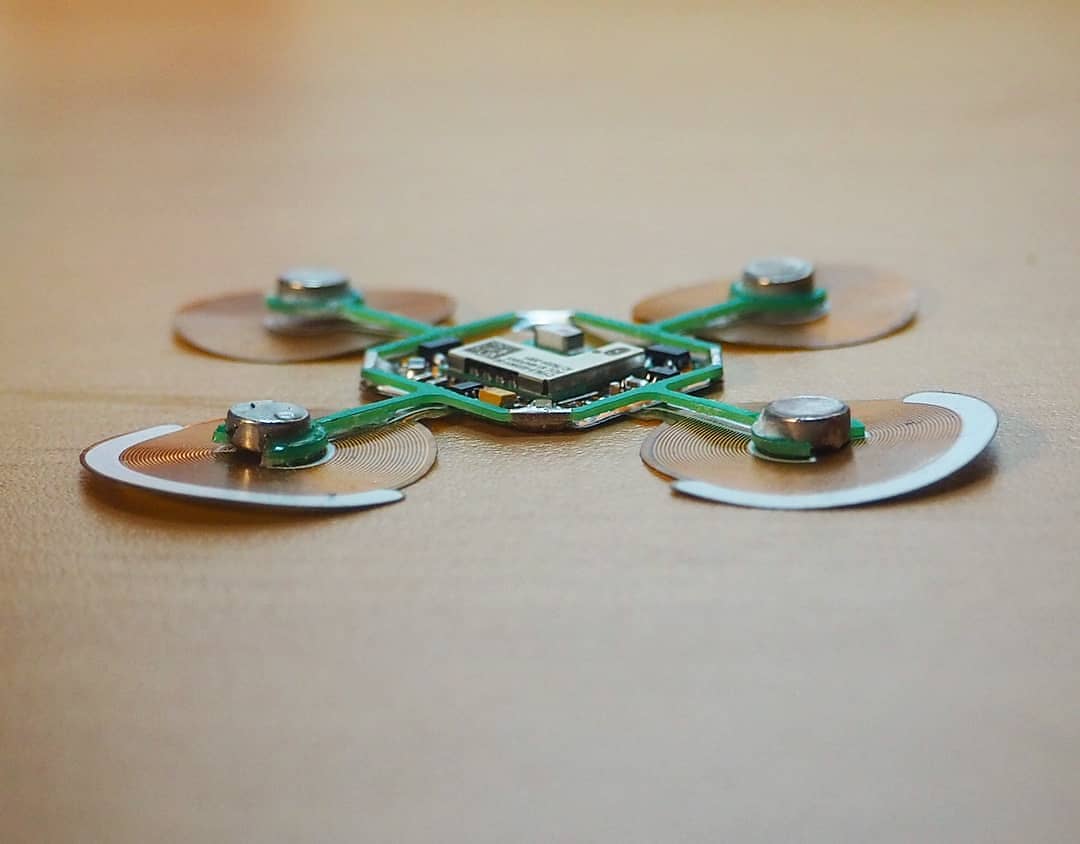
Herausforderung: Bauen Sie einen Roboter aus einem flexiblen Schaltkreis
Dieser Roboter basiert auf einem Scherenkonzept und ermöglicht das Gehen durch Flattern eines magnetischen flexiblen PCB-Aktuators.
Leider waren die Ergebnisse nicht so zufriedenstellend wie erwartet, da der Roboter bessere Bewegungen durch Vibrationen als durch das beabsichtigte Flattern zeigte. Dennoch lieferte dieser Misserfolg wertvolle Erkenntnisse und Lehren für zukünftige Projekte.
Video ansehenHerausforderung: Erschaffe einen vierbeinigen Baseball-Roboter-Transformer
4B (Four-Ball) ist ein vierbeiniger Roboter mit 12 Freiheitsgraden, der sich zu einem 6 cm großen Ball zusammenfalten lässt – das ist kleiner als ein Baseball! Um dies zu erreichen, musste jede Verbindung perfekt in die Kugel passen und gleichzeitig Platz für die Batterie und das Gehirn lassen.
Obwohl er winzig ist, verfügt er über drei Verbindungen an jedem Bein und Gelenke, die von Mikroservomotoren angetrieben werden. Das Gesamtgewicht des Roboters musste gering genug sein, damit diese winzigen Motoren genügend Drehmoment liefern und sein eigenes Gewicht auf mindestens drei Beinen heben konnten.
Der Roboter konnte zwar laufen, die Bewegung auf der Z-Achse war jedoch sehr eingeschränkt. Aufgrund eines ungleichmäßigen Schwerpunkts konnte er auch das Rollen nicht kontrollieren.
Video ansehen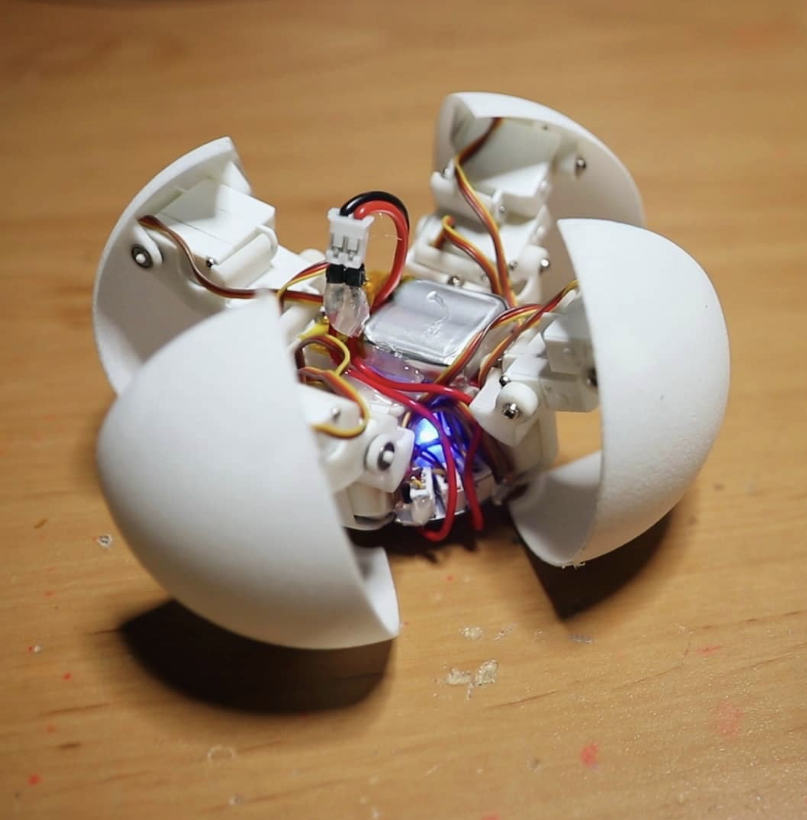
Herausforderung: Bauen Sie einen Roboter nur aus Leiterplatten
Was wäre, wenn das Gehirn Ihres Roboters (die Leiterplatte) auch dazu verwendet werden könnte, den Roboter anzutreiben?
So fing alles an! Mit der Entwicklung eines Roboters aus der Leiterplatte selbst. Ziel war es, die Kosten zu senken, was es zu einem idealen Szenario für Schwarmrobotik machte.
Das Konzept des Krabbelroboters funktionierte recht gut, es gab jedoch einige Probleme mit dem Batterieausgleich, sodass die Feinabstimmung für mehrere Bots eine Herausforderung darstellen würde.
Video ansehenEntdecken Sie unsere ultradünnen Aktuatoren, Motoren und Kompaktmodule
Erfahren Sie als Erster von neuen Projekten und sichern Sie sich spannende Angebote!


















