Motoren bestehen aus Rotor, Wicklungen und Antriebselektronik. Unsere MotorCell geht noch einen Schritt weiter und integriert alles in einem einzigen, ultrakompakten Modul. Es ist der kleinste kernlose Hochgeschwindigkeitsmotor mit planaren Leiterplattenwicklungen und integrierter sensorloser Steuerung, wodurch zusätzliche Sensoren überflüssig werden!
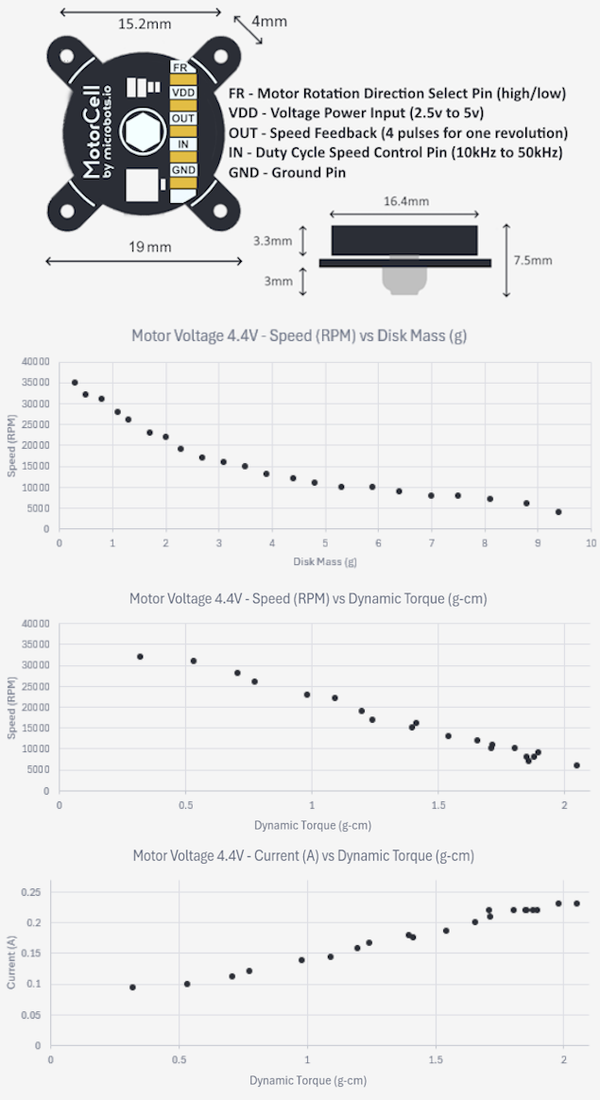
Es wurde für Anwendungen mit niedrigem Drehmoment und hoher Geschwindigkeit entwickelt, unterstützt die Geschwindigkeitsregelung über PWM und lässt sich nahtlos in die MotorCell-Bibliothek integrieren. Es bietet eine vorgefertigte PID-Regelung für CodeCell und andere ESP32-Geräte. MotorCell verwendet den BD67173NUX-Chip als dreiphasigen Gegen-EMK-Regler mit einem sensorlosen Antriebssystem, wodurch ein Hall-Sensor überflüssig wird. Seine Geschwindigkeit kann in 1.000-U/min-Schritten (mit der MotorCell-PID-Bibliothek) über ein PWM-Eingangssignal geregelt werden, wobei der IN-Pin standardmäßig auf niedrig eingestellt ist und den Motor auf volle Geschwindigkeit bringt, wenn er auf hoch (2,5–5 V) gezogen wird. Wenn der Motor zum Stoppen gezwungen wird, wechselt er in einen 5-sekündigen Sperrschutzmodus, der umgangen werden kann, indem der PWM-Eingang auf 0 % zurückgesetzt und wieder eingeschaltet wird. Diese Funktion wird automatisch von der Spin-Funktion der Bibliothek übernommen.
Das innovative, wellenlose Pancake-Design mit einem schlanken 3,3-mm-Aluminiumrotor ermöglicht die direkte Befestigung von Teilen an den Rotorzähnen. Dieser Rotor beherbergt die vier Bogenmagnete, eine Eisenrückplatte und Keramik-Hybrid-Kugellager. Er dreht sich mit bis zu 30.000 U/min (Leerlauf) – ideal für Lüfter, Robotik, Bastelarbeiten und Kunstprojekte.
Für kundenspezifische Designs kann der offene Stator in eine Leiterplatte integriert werden, wobei Rotorkomponenten für eine kompakte und robuste Lösung separat hinzugefügt werden können.
Im Lieferumfang enthalten sind die MotorCell, ein 5-poliger Stecker und vier M1.2-Schrauben. Die Leiterplatte ist ROHS-konform und entspricht dem IPC 6012 Klasse 3-Standard. Bitte beachten Sie, dass die MotorCell als Bausatz für Heimwerker gedacht ist. Für gewerbliche Zwecke kontaktieren Sie uns bitte.
Einige weitere Hinweise:
-
Dieser Motor ist für den Antrieb kleiner Lasten ausgelegt. Die Drehzahl nimmt mit zunehmender Last/dem Widerstand ab. Die maximale Drehlast beträgt 12 g bei einem Radius von 18 mm. Das Drehmoment-Drehzahl-Diagramm finden Sie in den Spezifikationen.
-
Achtung: Dieser Motor arbeitet mit hoher Geschwindigkeit. Halten Sie Ihre Hände von beweglichen Teilen fern und tragen Sie eine Schutzbrille, um Verletzungen zu vermeiden.
-
Beachten Sie, dass die Bibliothek automatisch einen Pull-up-Widerstand am OUT-Pin aktiviert, um den Geschwindigkeitswert auszulesen. Wenn Sie andere Controller mit der MotorCell-Bibliothek verwenden, stellen Sie sicher, dass der interne Pull-up aktiviert bleibt, oder fügen Sie einen externen hinzu.
-
Falls Sie den Motor zerlegen müssen, gehen Sie beim Lösen der Welle vorsichtig vor. Der Motor enthält kleine, präzisionsgefertigte Teile, die leicht verloren gehen können. Es wird empfohlen, die Welle beim Zusammenbau mit einem Drehmoment von 0,15 Nm anzuziehen. Seien Sie beim Löten von Drähten oder Steckern an die Leiterplatte vorsichtig, da der Lötkolben von den Motormagneten angezogen werden kann.
- Für den Einbau von Presspassungen empfehlen wir einen Innendurchmesser von 16,4 mm bis 16,6 mm, abhängig von der Toleranz Ihres 3D-Druckers. Nach dem Drucken drücken Sie Ihr Teil einfach in die Rotorzähne, um es zu fixieren. Sekundenkleber kann ebenfalls auf die Rotorzähne aufgetragen werden, um das Teil zu fixieren. Achten Sie darauf, dass der Kleber nur seitlich aufgetragen wird und nicht in die Nähe des Lagers der Motorzelle gelangt.