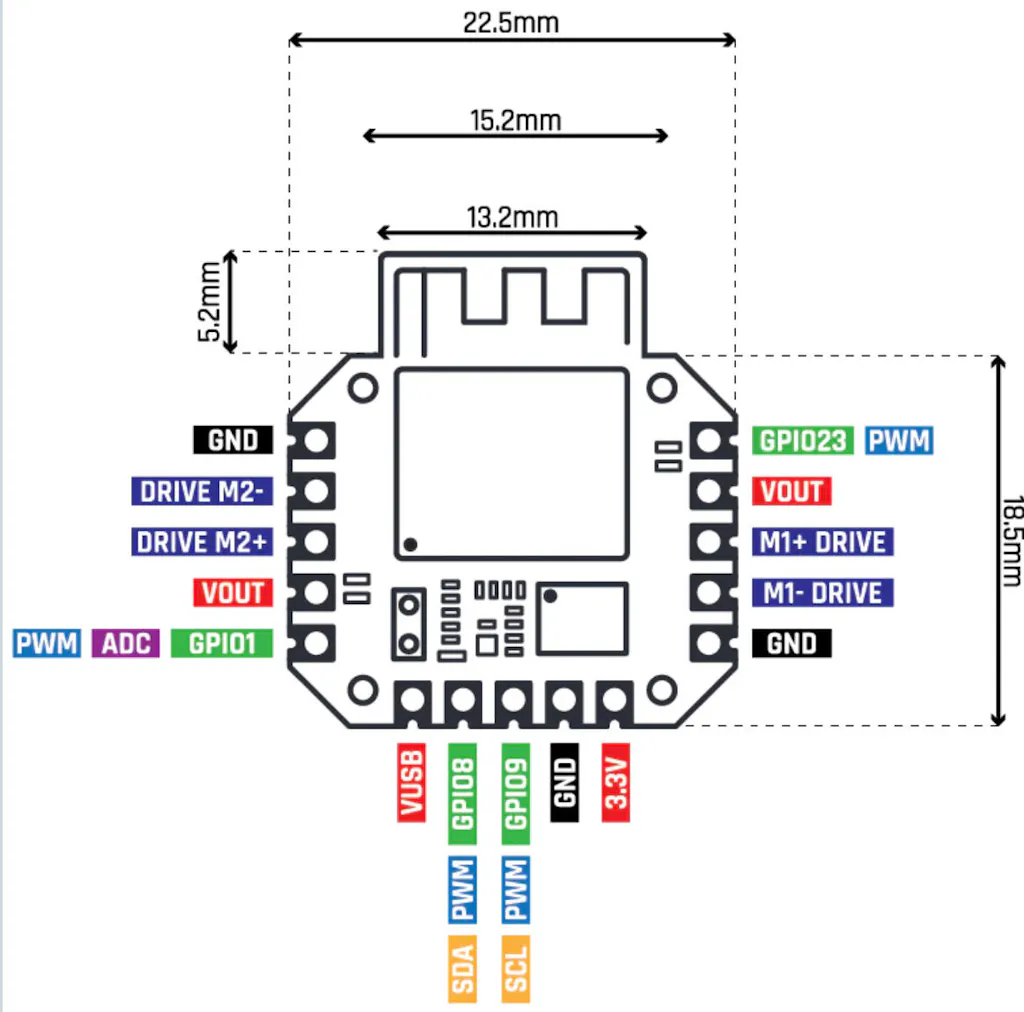
The CodeCell C6 Drive is a compact, all-in-one robotics module built to serve as the brain of your next robotic project. It can directly drive two independent DC motors or actuators from its onboard pins, and at just 2.25 cm wide, it’s powered by an Arduino-compatible ESP32-C6 microcontroller (ESP32-C6-MINI-1-H8 with 8 MB Flash and 512 KB SRAM). It supports Wi-Fi 6, Bluetooth LE 5, and Zigbee, enabling seamless wireless control, whether through Home Assistant or our MicroLink Bluetooth app.
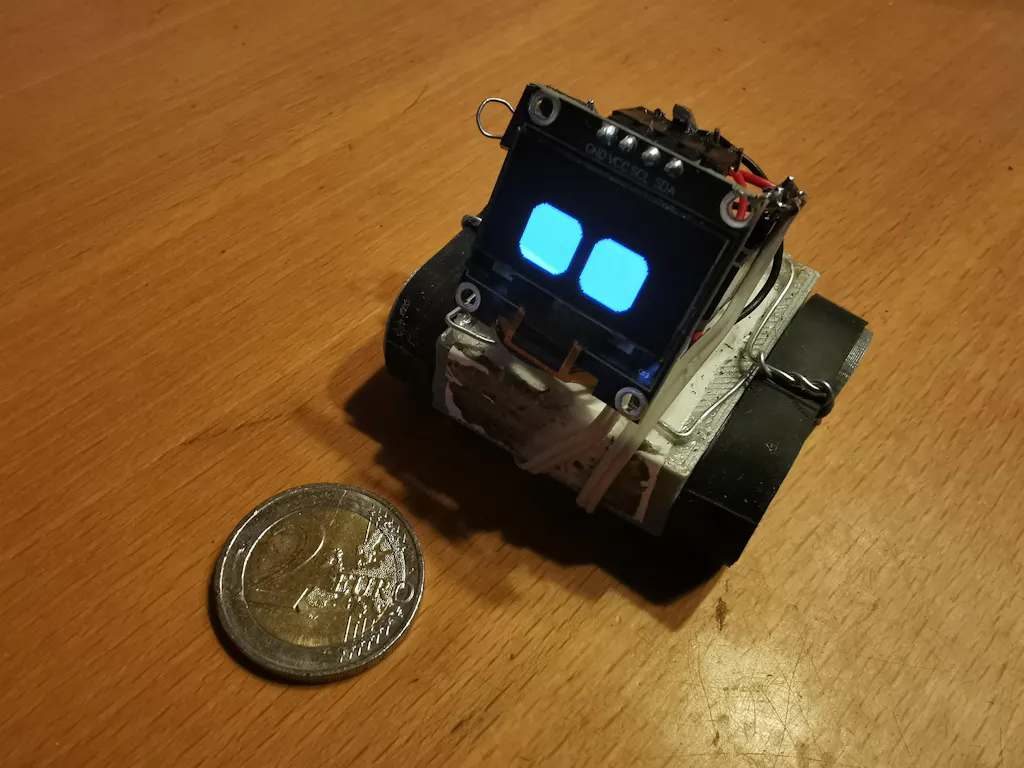
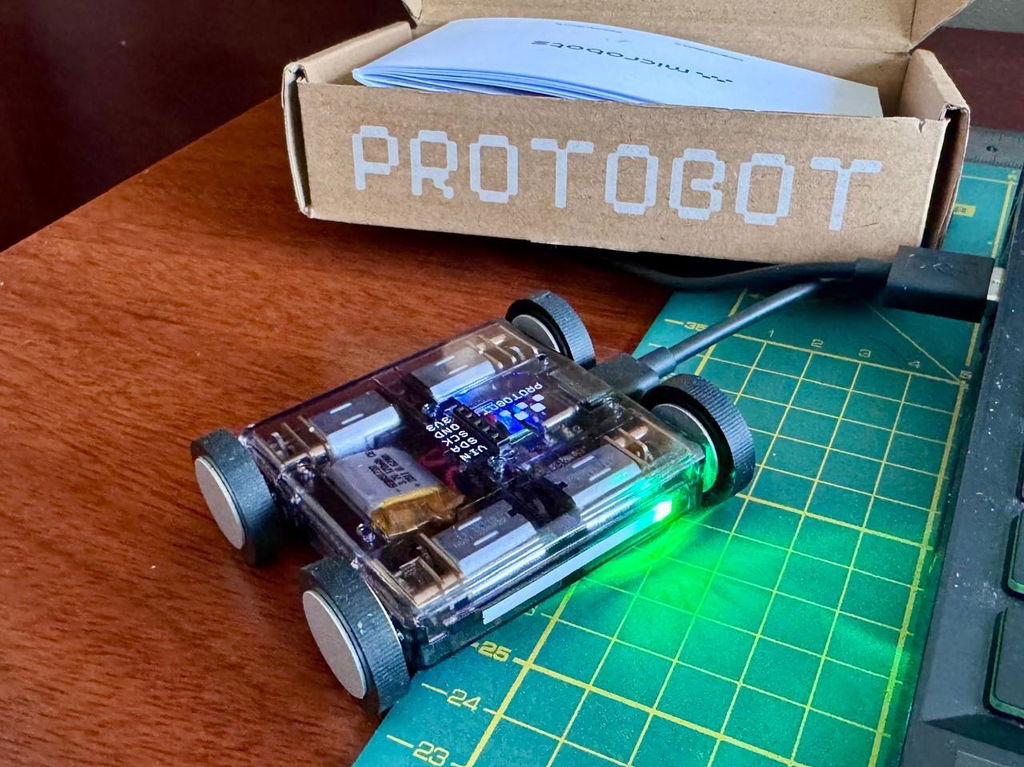
Just like the standard CodeCell C6, it includes onboard battery charging, ambient light and proximity sensing, and a 9-axis IMU, giving your projects robust sensing and motion capabilities in an incredibly small form factor. What makes the C6 Drive different is its built-in dual H-bridge drivers, allowing you to directly drive DC motors, buzzers, and actuators - This makes it the ultimate all-in-one robotics controller – no extra motor driver boards required. In fact this is the same module that powers our ProtoBot Robotic Platform - with the combination of onboard sensors, wireless connectivity, and driving 4 geared dc-motors!
⚠ Note: The dual onboard H-bridge drivers can directly drive a wide range of loads such as DC motors (for example our ProtoBot N20 motors), FlatFlap, CoilPad, other linear/rotary actuators, buzzers, and high-power LEDs. Some of our other modules, such as MotorCell and CoilCell, already include their own onboard drivers. In those cases, a standard CodeCell C6 or C3 is sufficient, and no additional motor driver is required. Please note that MotorCell is not compatible with the CodeCell C6 Drive, as MotorCell uses a 3-phase motor driver and its motor speed feedback cannot be read through the C6 Drive’s H-bridge outputs.

The CodeCell C6 Drive includes a VCNL4040 light sensor providing ambient light sensing and proximity detection up to 20 cm. It also include a BNO085 9-axis IMU combining an accelerometer, gyroscope, and magnetometer with onboard sensor-fusion. Together, they deliver orientation (roll, pitch, yaw), motion detection, activity classification, tap detection, step counts, linear acceleration, and more – enabling robots to sense and react to their environment in real time.
For low-power applications, the C6 Drive supports multiple wake-up sources: timers, light interrupts, proximity interrupts, and tap detection. This optionally lets your projects remain efficient.
To simplify development, the CodeCell.h Arduino library offers easy-to-use functions with examples and tutorials. The CodeCell C6 Drive also pairs with our free app, letting you add wireless controls (sliders, buttons, joystick), view real-time sensor feedback, and even display messages on a 20-character live display – ideal for robotics debugging and control.
Each box includes the CodeCell C6 Drive, a set of four M1.2 screws, and an optional pin-header. A 1.25 mm pitch battery cable is also provided, along with the optional 170 mAh 20C LiPo battery. The optional battery measures 23 × 17.5 × 8.7 mm, weighs 4.6 g, and comes pre-wired with a 1.25 mm female connector that plugs directly into the onboard connector. See the full battery datasheet here. Schematics for this module are available here.
This module uses the ESP32-C6-MINI-1-H8, which is certified for FCC, CE, TELEC, and Wi-Fi Alliance compliance. The CodeCell C6 Drive is also RoHS compliant and follows the IPC-A-600 II standard.
Please note that the CodeCell C6 Drive is intended as a DIY maker kit. For commercial use, please contact us.
We designed the C6 Drive to help you build robots in the smallest possible form factor — and we hope you’ll enjoy it as much as we do.
Happy Robo-Building!