Défi : plier un circuit flexible dans un rover de forme cubique
Ce petit robot, propulsé par un moteur PCB, a été créé à l'aide d'un circuit flexible pliable. Le circuit à six faces est fixé à l'arbre boulonné de la roue et comprend tous les capteurs et pilotes nécessaires pour faire fonctionner les quatre moteurs et contrôler le robot.
Les résultats ont été assez satisfaisants, mais un développement supplémentaire est nécessaire pour que ce robot puisse naviguer efficacement dans le monde extérieur.
Regarder la vidéo
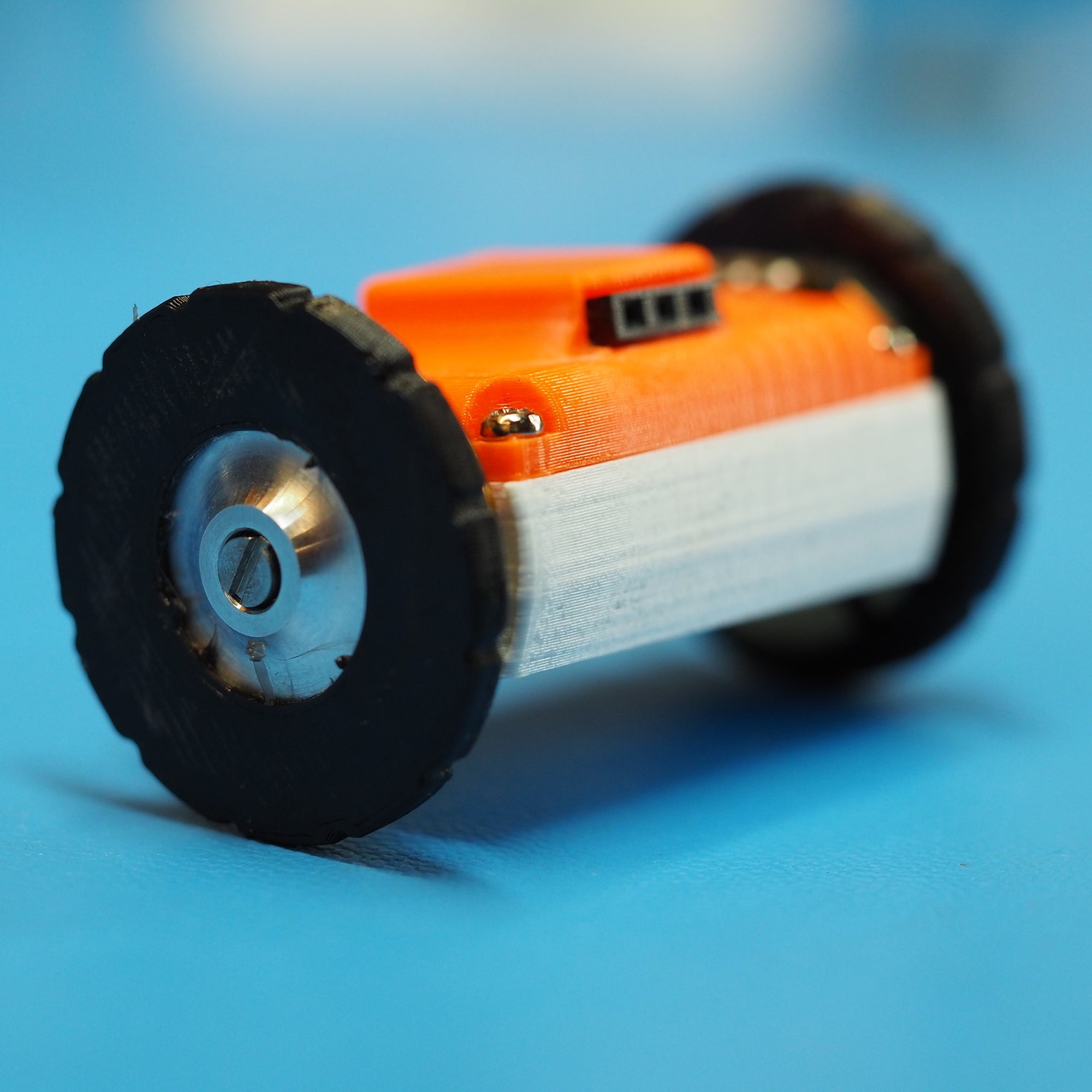
Défi : Construire un robot à moteur PCB à 2 roues
Le développement de ce robot a mis en évidence toutes les faiblesses et tous les défauts de notre projet de moteur PCB . Cependant, au fil du temps, tous les problèmes mécaniques ont été résolus et ce petit robot a réussi à rouler plutôt bien.
Le fait que ce robot utilise un moteur à circuit imprimé plat pour se déplacer signifie qu'il dispose de plus d'espace interne. Cela lui permet d'utiliser une batterie plus grande de 500 mA, ce qui prolonge sa durée de vie.
Regarder la vidéoDéfi : utilisez un circuit flexible pour créer une RoboFrog sauteuse
Ce robot a été fabriqué à partir d'un circuit flexible. Il ressemble à un autobus à deux étages : sur la partie inférieure, il y a quatre bobines et sur la partie supérieure, il y a des aimants et des composants électroniques de contrôle.
L'ensemble a réussi à sauter de quelques millimètres ; cependant, les manœuvres gauche/droite n'ont toujours pas pu être contrôlées.
Regarder la vidéo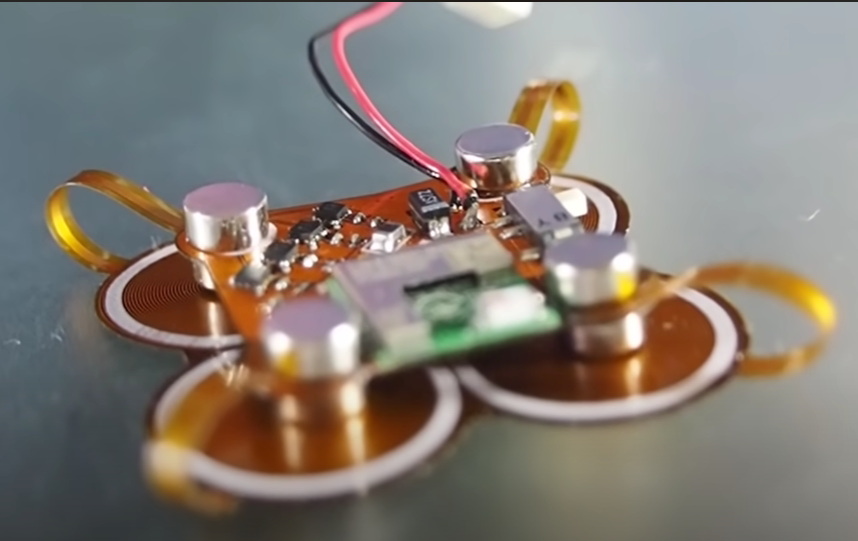

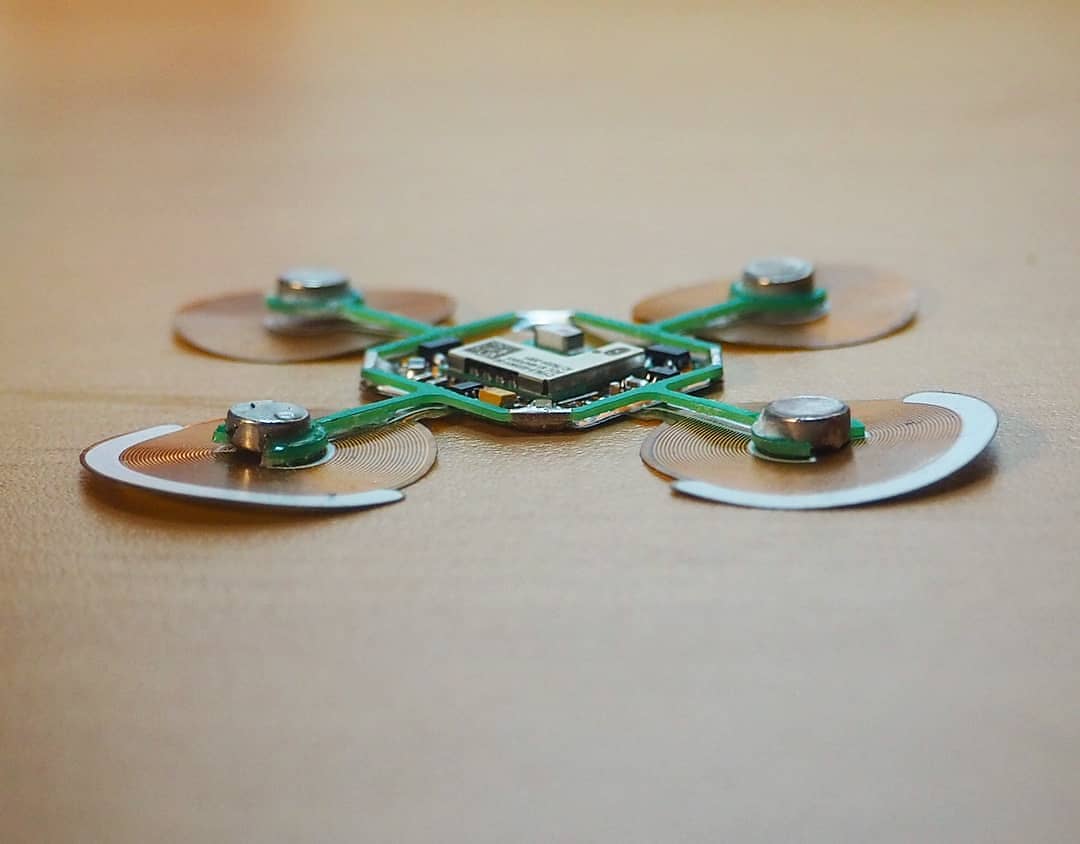
Défi : Construire un robot à partir d'un circuit flexible
Ce robot adopte un concept de type ciseaux conçu pour marcher en faisant battre un actionneur PCB flexible magnétique.
Malheureusement, les résultats n’ont pas été aussi satisfaisants que prévu, le robot se déplaçant mieux par vibration que par battement d’ailes. Néanmoins, cet échec a fourni des informations et des leçons précieuses pour les projets futurs.
Regarder la vidéoDéfi : Créer un robot transformateur à 4 pattes de type baseball
4B (Four-Ball) est un robot à quatre pattes doté de 12 degrés de liberté qui se replie en une boule de 6 cm, soit plus petite qu'une balle de baseball ! Pour y parvenir, chaque liaison devait s'aligner parfaitement dans la sphère tout en laissant de la place pour la batterie et le cerveau.
Bien que minuscule, il est doté de trois articulations sur chaque jambe et d'articulations actionnées par des micro-servomoteurs. Le poids total du robot devait être suffisamment léger pour que ces minuscules moteurs puissent fournir un couple suffisant et soulever son propre poids sur au moins trois jambes.
Le robot a réussi à marcher, même si le mouvement sur l'axe Z était très limité. Il n'a pas non plus réussi à contrôler le roulis en raison d'un centre de gravité irrégulier.
Regarder la vidéo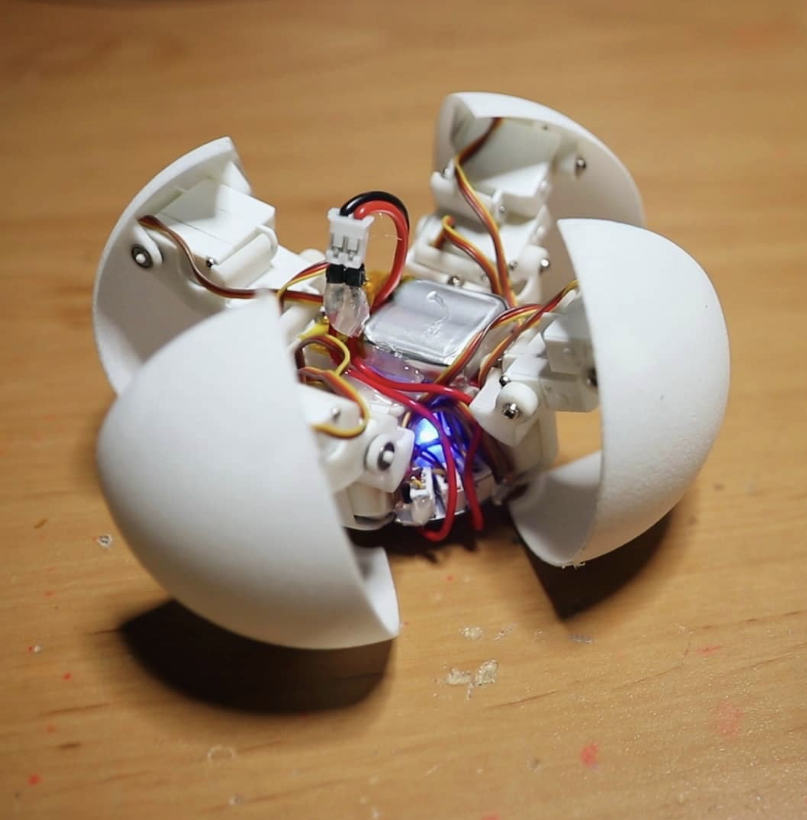
Défi : Construire un robot uniquement à partir de circuits imprimés
Et si le cerveau de votre robot (le circuit imprimé) pouvait également être utilisé pour actionner le robot autour de lui ?
C'est ainsi que tout a commencé ! La création d'un robot à partir du PCB lui-même. L'objectif était de réduire les coûts, ce qui en faisait un scénario idéal pour la robotique en essaim.
Le concept du robot rampant a plutôt bien fonctionné, même s'il a rencontré quelques problèmes d'équilibrage avec la batterie, ce qui serait difficile à régler avec précision pour plusieurs robots.
Regarder la vidéoDécouvrez nos actionneurs, moteurs et modules compacts ultra-minces
Soyez le premier informé des nouveaux projets et bénéficiez d'offres intéressantes !


















