Les moteurs sont constitués d'un rotor, de bobinages et d'une électronique de commande. Notre MotorCell va encore plus loin en intégrant le tout dans un seul module ultra-compact. C'est le plus petit moteur haute vitesse sans noyau, doté de bobinages sur circuit imprimé plan et d'une commande sans capteur intégrée, éliminant ainsi le besoin de capteurs supplémentaires !
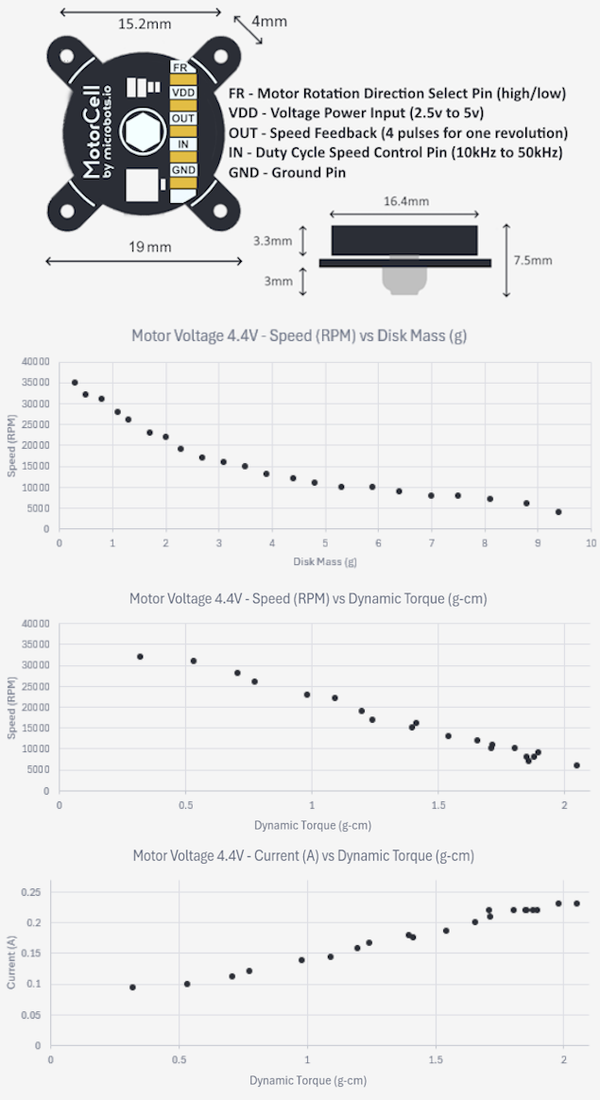
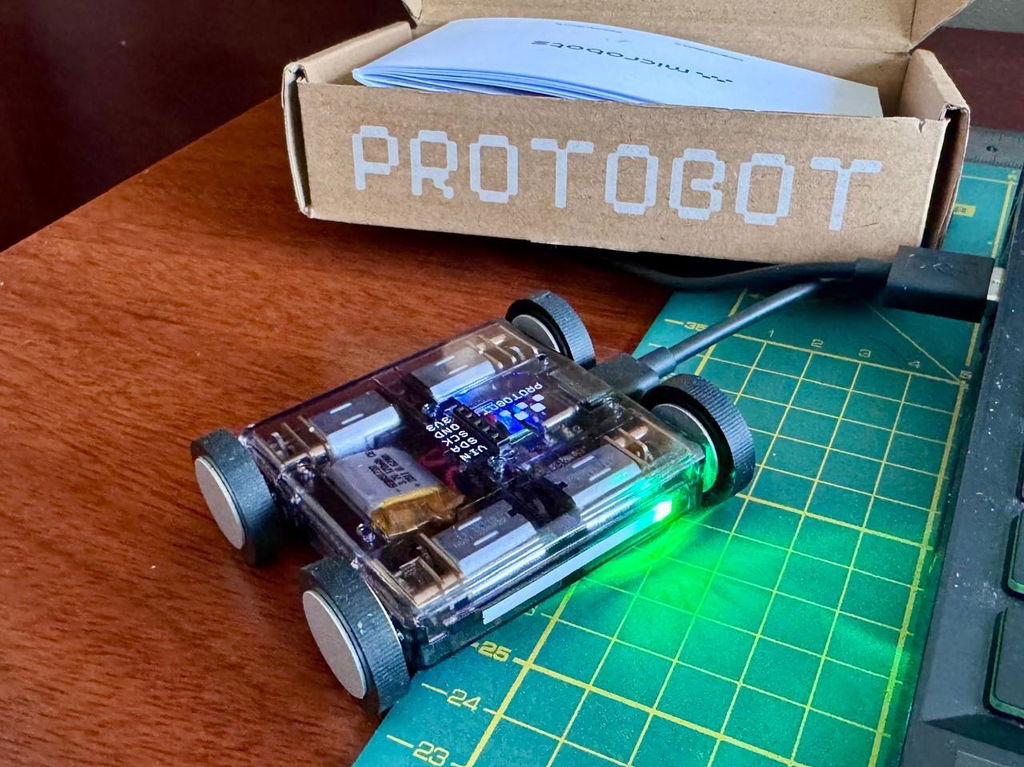
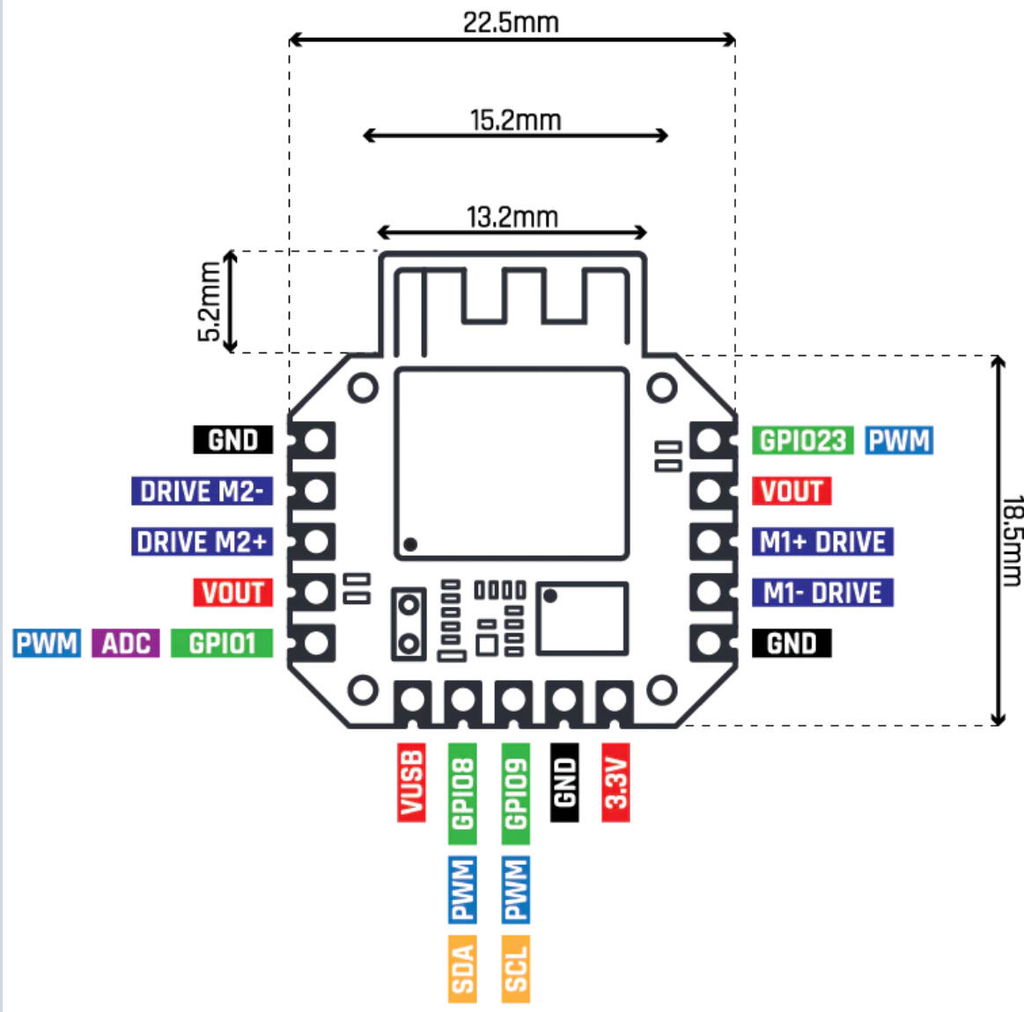
Conçu pour les applications à faible couple et haute vitesse, il prend en charge le contrôle de vitesse par MLI et s'intègre parfaitement à la bibliothèque MotorCell, offrant un contrôle PID préconfiguré pour CodeCell et autres dispositifs ESP32. Le MotorCell utilise la puce BD67173NUX comme contrôleur de force contre-électromotrice triphasé avec un système d'entraînement sans capteur, éliminant ainsi le besoin d'un capteur à effet Hall. Sa vitesse peut être contrôlée par incréments de 1 000 tr/min (avec la bibliothèque PID MotorCell) via un signal d'entrée MLI. La broche IN est par défaut à l'état bas et le moteur atteint sa vitesse maximale lorsqu'elle est portée à l'état haut (2,5-5 V). Si le moteur est forcé à s'arrêter, il entre en mode de protection de verrouillage de 5 secondes, qui peut être contourné en réinitialisant l'entrée MLI à 0 %, puis en la rallumant, une fonctionnalité gérée automatiquement par la fonction Spin de la bibliothèque.
Sa conception innovante sans arbre, composée d'un rotor fin en aluminium de 3,3 mm, permet une fixation directe des pièces sur les dents du rotor. Ce rotor abrite quatre aimants en arc, une plaque arrière en fer et des roulements à billes hybrides en céramique. Il tourne jusqu'à 30 000 tr/min (à vide), ce qui le rend idéal pour les ventilateurs, la robotique, les loisirs créatifs et les projets artistiques.
Pour les conceptions personnalisées, le stator ouvert peut être intégré dans un PCB, avec des composants de rotor ajoutés séparément pour une solution compacte et robuste.
Le coffret comprendra le MotorCell, un connecteur 5 broches et un jeu de quatre vis M1.2. Le circuit imprimé est conforme à la directive ROHS et à la norme IPC 6012 Classe 3. Veuillez également noter que le MotorCell est destiné à être utilisé comme kit de montage DIY. Pour toute utilisation commerciale, veuillez nous contacter .
Quelques autres notes :
-
Ce moteur est conçu pour entraîner de petites charges. La vitesse diminue à mesure que la charge/traînée augmente. La charge maximale en rotation est de 12 g pour un rayon de 18 mm. Consultez les spécifications pour le graphique complet du couple en fonction de la vitesse.
-
Attention : ce moteur fonctionne à grande vitesse. Éloignez vos mains des pièces mobiles et portez des lunettes de protection pour éviter les blessures.
-
Gardez à l'esprit que la bibliothèque active automatiquement une résistance de rappel sur la broche OUT pour lire la valeur de vitesse. Si vous utilisez d'autres contrôleurs avec la bibliothèque MotorCell, assurez-vous que la résistance de rappel interne reste activée ou ajoutez-en une externe.
-
Si vous devez démonter le moteur, manipulez-le avec précaution lors du dévissage de l'arbre. Le moteur contient de petites pièces usinées avec précision, faciles à perdre. Il est recommandé de serrer l'arbre à un couple de 0,15 Nm lors du remontage. Lors du soudage de fils ou de connecteurs sur le circuit imprimé, soyez prudent : le fer à souder pourrait être attiré vers les aimants du moteur.
- Pour l'installation de pièces imprimées en 3D par press-fit, nous recommandons un diamètre intérieur de 16,4 à 16,6 mm, en fonction de la tolérance de votre imprimante 3D. Une fois imprimée, il suffit d'enfoncer la pièce dans les dents du rotor pour la maintenir en place. Vous pouvez également appliquer de la superglue sur les dents du rotor pour fixer la pièce. Veillez à n'appliquer la colle que sur les côtés et à ne pas pénétrer près du roulement du MotorCell.